







為了避免影響使用,稱重傳感器在使用前的部分負荷的錯誤檢測校正,消除了誤差的四個角落。
結構特點及工作原理
測力傳感器的四角誤差測試儀,以便根據稱重傳感器檢定規程要求進行測試,以滿足國內的稱重傳感器,主要用于稱重傳感器的錯誤檢測的四個角落。
的電流檢測方法是模擬的,施加稱重傳感器在不同方向上的四個角落,以滿足要求的重量,負載傳感器的輸出值通過測量來確定的四個角落部分負載誤差。對于負載的重量,有主要以兩種方式加載的手動加載和氣缸的驅動四組權重。
手動負載是指給操作員手動加載重量的稱重傳感器,和相應的稱重傳感器輸出的檢測。手不能放在固定,經常出現偏差,從而影響了檢測的準確性。有限的范圍內手動加載,稱重范圍負載稍大手動加載的勞動強度大,效率低。汽缸四組權重是由氣缸驅動的負載裝置和卸載的稱重傳感器的模擬位置,相應的輸出的稱重傳感器檢測。準確比手動加載加載位置,范圍更大,但是的面積,使用四套權重加工誤差檢測不高,重復性差,裝載相對固定的位置,該設備適用于幾個模型的傳感器,通用性差。
原則
稱重傳感器方誤差測試儀,使用一組固定的負載(重量)的負載傳感器的負載的檢測裝置,傳感器360°的順時針和逆時針旋轉,以模擬鍋的四個角。重量的加載裝置,用于加載的半徑的中心,立即加載重量的稱重傳感器時,順時針和逆時針轉動一個預定的角度,而稱重控制系統記錄了下一個稱重傳感器輸出值,作為今后的校正基準。
結構特點
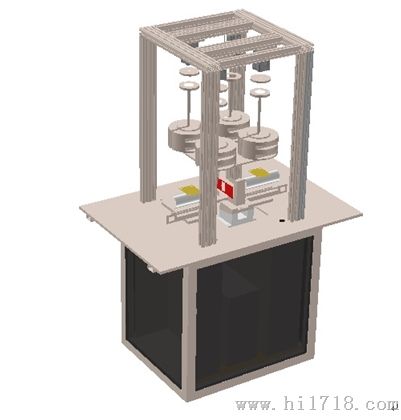
負載細胞轉角誤差測試儀本體,控制系統,回轉工作臺,固定的夾緊裝置,裝載裝置,夾緊裝置,固定波束,由八個部分組成的組(重量)。稱重傳感器的轉角誤差測試儀組件的結構如下:身體的腿放置在地面上,身體的上半部分的平臺上配備的驅動馬達360°的旋轉轉塔;固定夾緊裝置根據所述重量傳感器的大小交換,它的一端被固定在旋轉工作臺的另一端固定在測試稱重傳感器,固定在機體上的固定波束的平臺上的保持裝置被固定到固定波束,可以夾持裝載單元的重量組和裝載單元,裝載單元的正上方的轉盤的旋轉中心;懸臂可能會增加相關的卸載荷蘭。的控制系統下,分別和保持裝置,驅動電機連接到轉盤。
旋轉工作臺是用來驅動順時針和逆時針轉動的負載傳感器。固定夾持裝置,用于根據要被替換的稱重傳感器的大小,固定在轉盤和它的大小的稱重傳感器。夾緊裝置夾緊的裝載單元被固定在固定波束,的測試保持裝置釋放裝載單元被裝入稱重傳感器。重量組放置在懸臂裝載裝置,可以被替換的權重的大小,根據負載單元格范圍的大小,也可以負載的位置可以調整,以滿足不同的測力傳感器的負載模擬半徑周圍的懸臂。
控制系統由傳感器反饋信號,信號采集單元的驅動電機控制輸出單元,控制和采集傳感器輸出顯示單元的。按照標準方法和數據處理,顯示,存儲和打印格式收集來自傳感器的信號采集單元的輸出數據。提供了方便,直觀,準確,快速,標準,且易于儲存的數據處理效果。
是專門研制的控制系統控制軟件的負載細胞的四個角誤差試驗檢測,數據采集,自動控制,數據管理于一體,功能的。軟件界面為標準的Windows界面風格,簡單,直觀,操作簡便,易于掌握。數據庫管理,收集的測試數據從傳感器輸出自動保存測試數據,并支持多種數據查詢。數據輸出,可支持中國的數據報表和數據,可以導入到Word或PDF文件。
測試過程
在測試開始之前,操作者先根據測力傳感器的合適的固定夾緊裝置的大小選擇,然后稱重傳感器固定在其一端固定夾緊裝置。在懸臂上的裝載單元裝載到所述的稱重傳感器的測試標準,并選擇相應的質量權重“組,并根據加載的半徑的要求來調整位置,以懸臂的質量集,和后的下端裝載單元連接的負載傳感器。
測試開始時,操作員通過控制系統控制釋放的加載裝置的夾緊裝置,質量設定載荷通過加載單元加載的稱重傳感器。由控制裝置控制的轉臺順時針和逆時針轉動,由一端連接在測試過程中,裝載單元和轉臺的轉動中心在同一條直線上,稱重傳感器和被保留的移動設備周圍的一端的旋轉被加載,在同一時間。重量團體卸載。當轉盤旋轉一個預定的角度時,測試過程中,控制裝置記錄稱重傳感器在裝載重量組中,四個不同的輸出值的角度傳感器的校準修正,存儲,顯示測試結果,從而完成測試。
試驗結束后,操作員通過控制系統來控制夾緊裝置拿起裝載裝置,取出稱重傳感器和稱重傳感器做出鑒定校正的校準數據的基礎上,為了糾正該錯誤校正后的過程。
稱重傳感器四角誤差測試儀使用單一的一套裝入的權重,以避免權重的多組的制造誤差的影響,大小,重量和負載位置可以根據測試的需要進行調整,適用于不同大小和不同范圍的各種稱重傳感器角落錯誤檢測,整個測試過程自動完成,速度和效率。稱重傳感器四角誤差測試儀與現有的負載相比,具有結構簡單,操作方便,效率高,定位高,通用,同時也降低了試驗人員的勞動強度。稱重傳感器誤差測試儀可以提供的四個角高稱重傳感器生產稱重傳感器商品部分負載測試和部分負荷修訂提供的數據,基于稱重傳感器的四個角角,從而產品質量,增強產品的性,并終競爭力的產品。








